SiMOD sarà incentrato sullo sviluppo di un sistema multi-robot per applicazioni di interesse industriale che implicano la manipolazione di oggetti deformabili di dimensioni significative. L’obiettivo è migliorare l’esperienza lavorativa diminuendo lo sforzo fisico e cognitivo dei lavoratori del settore manifatturiero.
Robot collaborativi
SiMOD intende sviluppare un framework di manipolazione, basato su robot manipolatori collaborativi installati su piattaforme mobili, in grado di percepire e co-manipolare oggetti deformabili per applicazioni industriali.
L’obiettivo è diminuire lo sforzo fisico e cognitivo dei lavoratori del settore manifatturiero in applicazioni che implicano la manipolazione di oggetti deformabili di dimensioni significative e non automatizzabili in maniera flessibile con le soluzioni tecnologiche disponibili.
Obiettivi
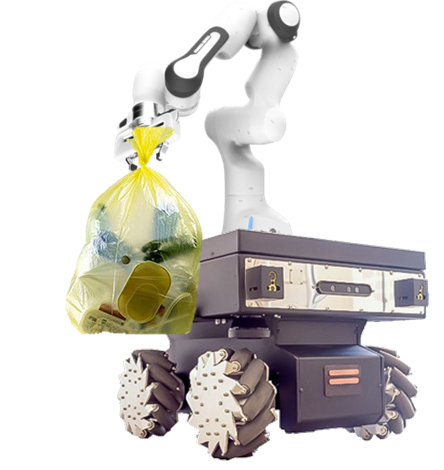
Verrà sviluppato un sistema multi-robot per applicazioni di interesse industriale che implicano la manipolazione di oggetti deformabili di dimensioni significative, tipo cavi elettrici, sacchetti di materiale sfuso o pacchi di materiale soffice, che rispondano ai problemi e ai bisogni delle aziende e in grado di generare nuovi mercati e vantaggi competitivi a medio e lungo termine, con particolare impatto nell’ambito dalla manifattura, della logistica delle merci e della raccolta dei rifiuti.
Piano delle attività
In collaborazione con le aziende verranno innanzitutto definiti i casi d’uso, le modalità di verifica del progetto e lo scenario operativo. Per il riconoscimento e la stima della posa, saranno sviluppati algoritmi di segmentazione di oggetti deformabili utilizzando informazioni quali texture e dimensioni approssimative dei colli.
A seguire verrà sviluppata un’innovativa strategia per pianificare la presa e la manipolazione bimanuale di oggetti deformabili.
Verrà inoltre implementato un sistema di manipolazione mobile e collaborativo. Si definiranno la piattaforma mobile, il manipolatore e il sistema di presa.
Verranno poi definiti e verrà fatta la sperimentazione degli algoritmi di percezione, degli algoritmi di pianificazione offline e real-time della manipolazione bimanuale e dei singoli sistemi meccatronici sviluppati, in modo che ciascun sotto-sistema possa essere validato indipendente dagli altri.
I manipolatori mobili integranti le tecnologie di percezione, pianificazione e controllo della manipolazione sviluppati saranno successivamente messi in opera per esperimenti relativi alle operazioni specifiche previste dagli scenari applicativi.
Saranno infine realizzati gli esperimenti dimostrativi conclusivi sulla manipolazione di confezioni non rigide nella logistica industriale, la disposizione di cavi nell’assemblaggio di quadri elettrici e nella raccolta di rifiuti.
Risultati
Il prototipo realizzato permetterà di ottenere le tecnologie abilitanti per la successiva realizzazione e commercializzazione di prodotti e servizi, e sviluppare una innovativa tecnologia per la manipolazione mobile multi-robot. Il prototipo, costituito da due manipolatori mobili dotati di sistemi di percezione per l’acquisizione ed analisi degli oggetti e degli scenari operativi, nonché di organi di presa adatti alle manipolazioni da svolgere, sarà a disposizione delle imprese come dimostratore.